6. 핵심 기능¶
이 장에서는 장치의 많은 응용 방법 중 일부만 보여줍니다. 각 섹션 당 하나의 예제가 있으며 직접 따라해보실 수 있도록 단계별 지침이 제공됩니다. 이 장의 목표는 특히 Intrepid 하드웨어 및 소프트웨어를 처음 접하는 사람들을 지원하는 것이므로 단순화된 예가 제공됩니다. 고급 사용자는 마지막 2개의 예제로 건너뛸 수 있습니다. 예제에서는 Intrepid의 Vehicle Spy를 사용합니다. Vehicle Spy의 복잡성으로 인해 예제에 필요한 기본 사항만 설명합니다. 이 강력한 소프트웨어 도구에 대한 자세한 내용은 별도의 Vehicle Spy 설명서를 참조하십시오.
메모
Intrepid는 각기 다른 네트워크가 통합되어 있는 다양한 하드웨어를 만듭니다. 장치에 다음 섹션의 일부 네트워크 및 기능이 없을 수 있습니다. 장치의 기능이 확실하지 않은 경우 다음을 참조하십시오. 소개 및 개요 또는 연락 icskoreasupport@intrepidcs.com
6.1. 차량 네트워크와의 인터페이스¶
6.1.1. CAN/CAN-FD 및 이더넷 모니터링¶
장치가 올바르게 구성되면 이 예는 장치가 Vehicle Spy 3를 사용하여 벤치 네트워크에서 CAN 트래픽을 모니터링하는 방법을 보여줍니다.
네트워크에 이미 다른 장치에서 전송 중인 CAN 메시지가 있다고 가정하면 다음과 같은 간단한 단계를 통해 해당 트래픽을 모니터링할 수 있습니다.
Vehicle Spy 실행: 해당 아이콘을 두 번 클릭하거나 Windows 시작 메뉴에서 선택하여 Vehicle Spy를 시작하십시오.
장치 선택: Logon 화면(첫 시작 화면)에서 장치 옆에 아직 녹색 확인 표시가 없는 경우 장치를 선택합니다. 장치를 선택하기 위해서는 장치 이름을 마우스 오른쪽 버튼으로 클릭하고 Select Hardware 를 클릭합니다.
온라인하기: Vehicle Spy의 왼쪽 상단 모서리에 있는 파란색 버튼을 누릅니다.
프로그램이 온라인 상태가 되면 자동으로 Messages 메뉴로 전환되어 들어오는 트래픽을 보여줍니다. 아래 예는 장치로 전송되는 CAN 메시지를 보여줍니다. 기본적으로 동일한 중재 ID의 CAN 메시지는 가장 최신 데이터 바이트와 함께 표시됩니다(정적 보기). 마찬가지로 이더넷 메시지는 소스 주소 및 Ethertype을 기반으로 그룹화됩니다. 메시지를 시간순으로 보려면 메시지 디스플레이 바로 위에 있는 Scroll 버튼을 누르십시오.
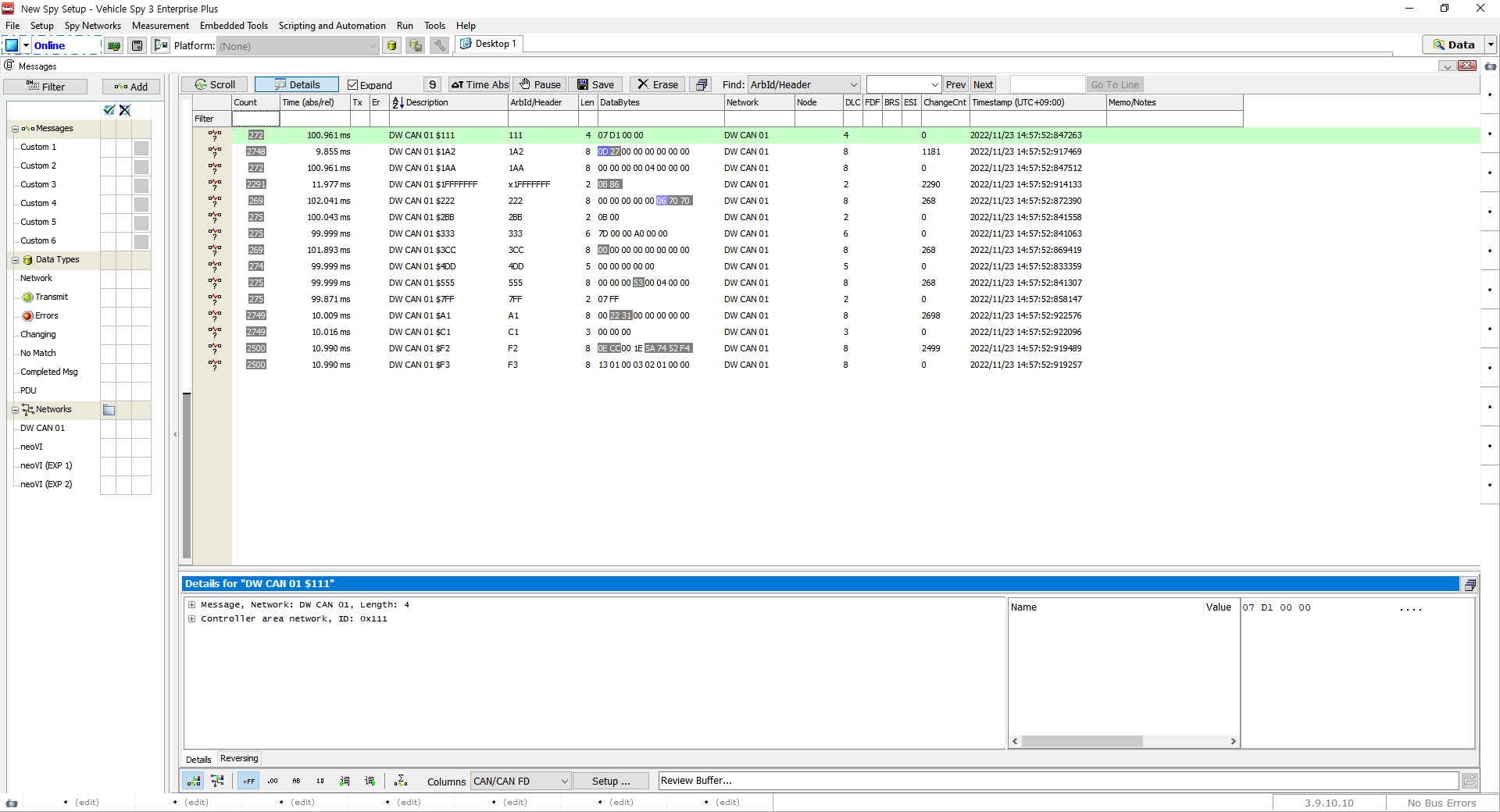
메시지는 일부 헤더 정보 및 데이터 바이트와 함께 raw 형식으로 표시됩니다. 모니터링 중인 메시지 트래픽과 일치하는 데이터베이스가 있는 경우 이를 플랫폼에 불러오면 Vehicle Spy가 메시지를 디코딩하여 각 신호를 표시합니다. 이를 수행하는 방법에 대한 자세한 내용은 Vehicle Spy 문서를 참조하십시오.
6.1.2. CAN/CAN-FD 및 이더넷에서 전송¶
장치로 네트워크 트래픽을 모니터링하는 것 외에도 자체 트래픽을 쉽게 생성하고 전송할 수 있습니다. HS CAN 채널에서 맞춤형 CAN 메시지를 생성하고 전송하는 것을 보여드리겠습니다.
CAN 전송 메시지 생성¶
장치가 차량 네트워크에 연결되어 있는지 확인하십시오. 그런 다음, 다음 단계에 따라 메시지를 만들고 전송합니다.
Vehicle Spy 실행: 해당 아이콘을 두 번 클릭하거나 Windows 시작 메뉴에서 선택하여 Vehicle Spy를 시작하십시오.
장치 선택: Logon 화면(첫 시작 화면)에서 장치 옆에 아직 녹색 확인 표시가 없는 경우 장치를 선택합니다. 장치를 선택하기 위해서는 장치 이름을 마우스 오른쪽 버튼으로 클릭하고 Select Hardware 를 클릭합니다.
Messages Editor 열기: Spy Networks 메뉴에서 Messages Editor 를 선택합니다.
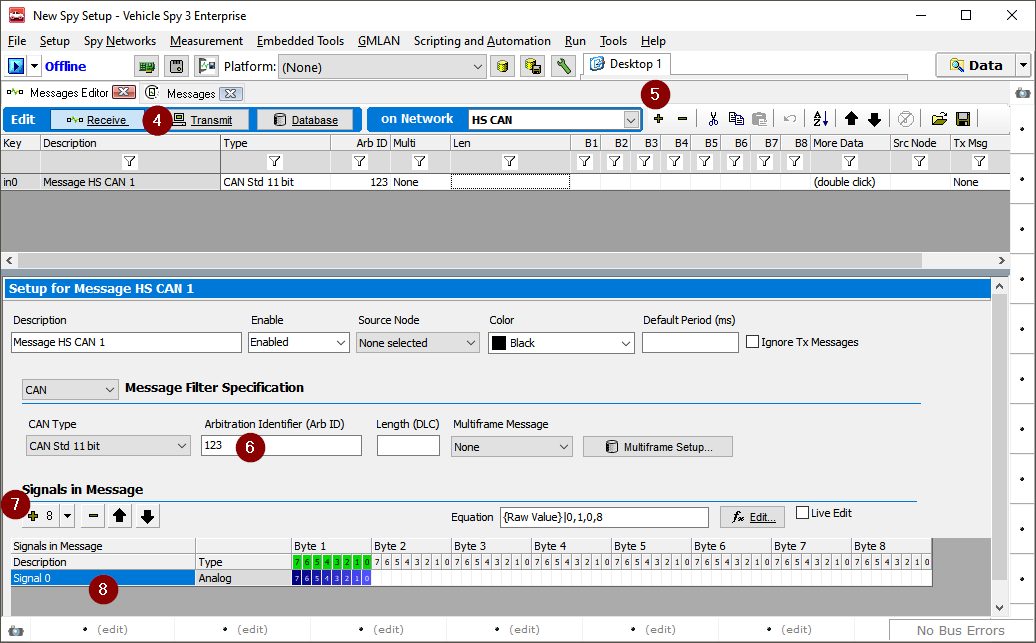
Transmit 선택: 파란색 막대에 있는 Transmit 버튼을 클릭합니다.
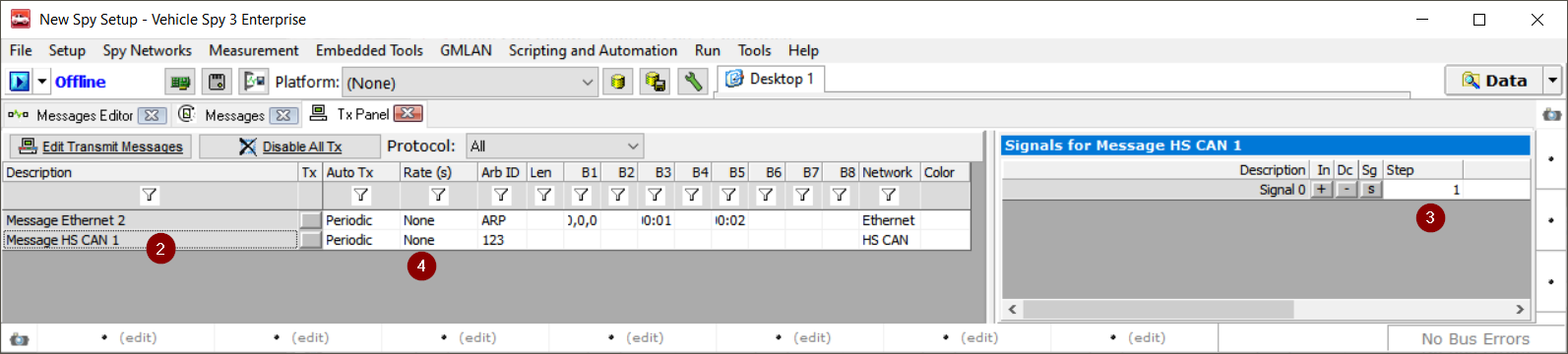
송신 메시지 생성: 현재 “HS CAN”이 표시된 드롭다운 상자의 오른쪽에 있는 + 버튼을 클릭합니다. Vehicle Spy는 기본값으로 미리 설정된 “Tx Message HS CAN 1”이라는 새로운 HS CAN 송신 메시지를 생성합니다.
메시지 중재 ID를 0x123으로 설정: 메시지의 Arb ID 열 아래에 값 “123”을 입력합니다.
메시지 신호 추가: 화면 중앙에서 Signals in Message 바로 아래에 있는 + 버튼을 클릭하십시오. Signal이라는 신호가 생성됩니다.
메시지 신호 이름 바꾸기: Description 열에서 Signal 을 두 번 클릭하고 이름을 Engine Speed 로 변경합니다.
이더넷 전송 메시지 생성¶
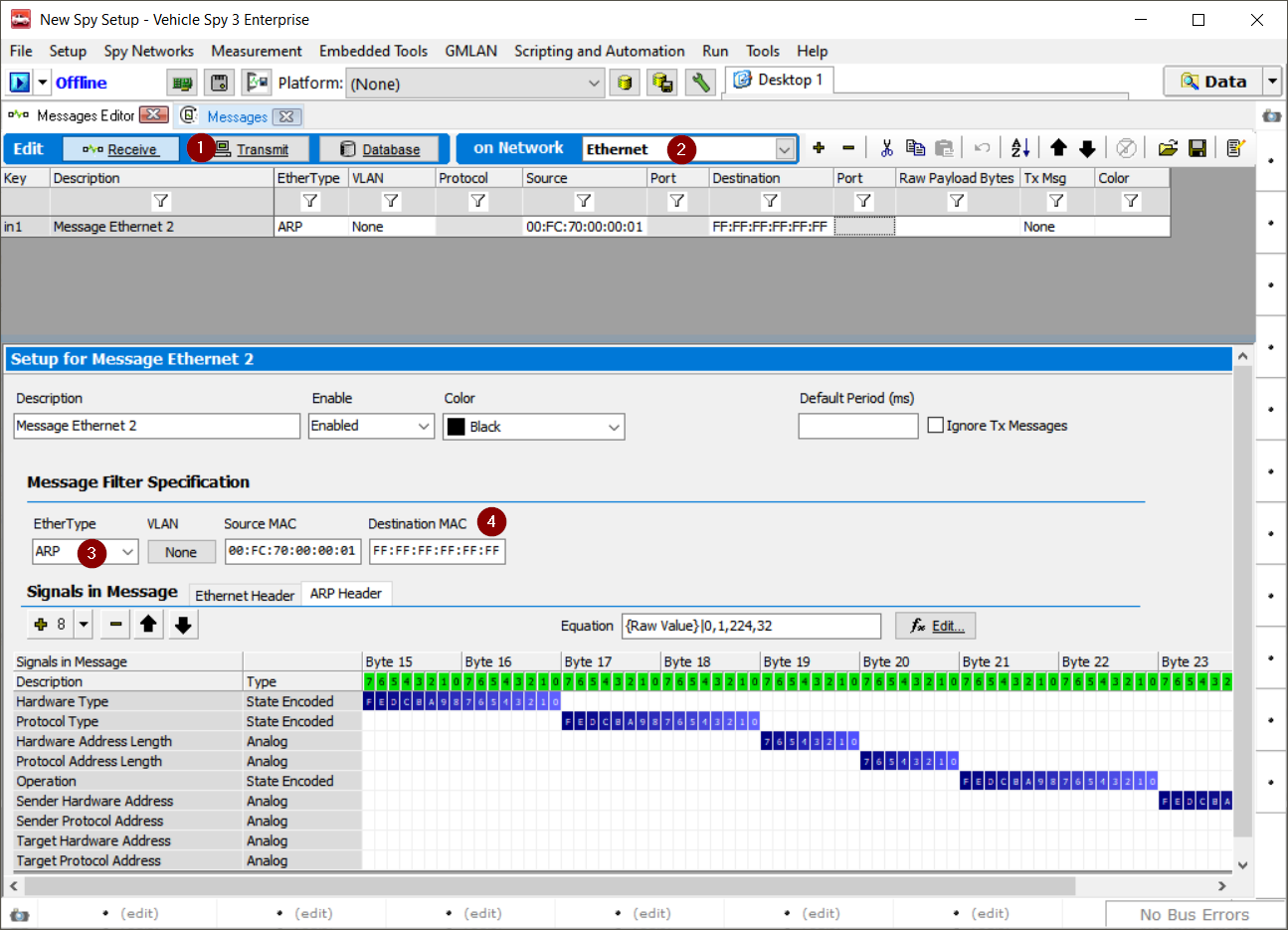
Transmit 선택: 파란색 막대에 있는 Transmit 버튼을 클릭합니다.
Ethernet 송신 테이블로 변경: Network 드롭다운 메뉴에서 Ethernet 을 선택합니다.
Ethertype 변경: Ethertype 드롭다운 메뉴에서 ARP 를 선택합니다.
도착 주소 변경: Destination MAC 으로 브로드캐스트 주소를 사용합니다. (FF:FF:FF:FF:FF:FF)
CAN 및 이더넷에서 전송¶
이제 Tx Panel 을 사용하여 해당 신호를 보낼 간단한 고정 값을 지정한 다음 Vehicle Spy가 주기적으로 메시지를 전송하도록 지시합니다.
Tx Panel 열기: Spy Networks 메뉴에서 Tx Panel 를 선택합니다.
메시지 선택: 화면 왼쪽의 Description 아래에 있는 “HS CAN Message”를 클릭합니다.
신호 데이터 값 설정: 화면 오른쪽에서 “Engine Speed” 신호의 Value 아래를 두 번 클릭하고 “207”을 입력합니다. (먼저 Tx Panel 의 반을 분리하는 수직 구분선을 클릭하고 왼쪽으로 끌어 이동해야 할 수도 있습니다.)
전송 속도 선택: 기본적으로 메시지는 “Periodic” 전송으로 설정되지만 속도는 “None”으로 표시됩니다. 이 필드를 두 번 클릭하고 아래로 스크롤하여 CAN 및 이더넷 메시지 모두에 대해 “0.100”을 선택합니다.
모니터링¶
이제 Messages 메뉴로 전환하고 온라인하여 CAN 및 이더넷 네트워크에서 전송되는 메시지를 확인하겠습니다.
Messages 메뉴로 전환: Spy Networks 에서 Messages 를 선택합니다.
온라인 하기: Vehicle Spy의 왼쪽 상단 모서리에 있는 파란색 화살표 버튼을 누릅니다. 이제 새 “Message HS CAN 1” 메시지가 약 100ms마다 표시되어야 합니다. Tx 열 아래에 녹색 점이 있으면 송신된 메세지로 이해할 수 있습니다.
메시지 확장: “Message HS CAN 1” 왼쪽에 있는 + 기호를 누릅니다. Vehicle Spy는 “Engine Speed” 시그널 값을 10진수(207)와 16진수(0xCF)로 보여줍니다.
당연히 실제 예에서 우리는 엔진 속도에 대한 보다 사실적인 묘사를 하고 싶을 것입니다. 이것은 엔진 동작을 설명하고 메시지 전송을 제어하는 Funtion Block 프로그램을 작성하는 등 Vehicle Spy에서 다양한 방법으로 수행할 수 있습니다. 프레임 전송 및 시뮬레이션의 예는 Vehicle Spy 문서, Intrepid 웹사이트 또는 Intrepid의 기술 지원을 참조하십시오.
6.2. CoreMini 스크립팅¶
장치는 PC와 독립적으로 또는 PC에 연결되어 있고 Vehicle Spy를 실행하는 동안 CoreMini 스크립트를 실행할 수 있습니다.
스크립트가 장치에 로드되면 다음 두 가지 방법 중 하나로 실행할 수 있습니다.
스크립트가 로드된 장치는 장치를 열거하지 않는 USB 충전기, 보조 배터리 또는 기타 USB 전원에 장치를 연결합니다. 전원이 공급되고 장치가 PC에 열거되지 않을 때 장치에서 스크립트를 실행합니다.
장치를 컴퓨터의 표준 USB 포트에 연결합니다. 스크립트를 장치로 보낼 때 Run CoreMini after download 옵션을 사용하십시오. 그러면 하드웨어에서 스크립트가 실행되고 Vehicle Spy를 동시에 사용할 수 있으며 추가 작업을 동시에 수행할 수 있습니다. 스크립트가 지워지거나 USB 포트에서 분리될 때까지 장치가 이러한 방식으로 작동합니다.
CoreMini 스크립팅에 대한 자세한 내용은 Vehicle Spy 문서를 참조하십시오.
6.3. neoVI API¶
모든 Intrepid 제품은 다른 소프트웨어 패키지 또는 맞춤형 소프트웨어에서 장치를 제어할 수 있는 전체 API를 지원합니다. API 사용에 대한 지침은 Intrepid 웹사이트에서 해당 설명서를 참조하십시오.