5. neoVI Explorer 설정 유틸리티¶
5.1. neoVI Explorer 시작 및 사용¶
neoVI Explorer 유틸리티를 사용하면 모든 Intrepid Control Systems 하드웨어에 연결, 관리 및 설정할 수 있습니다. 이 유틸리티는 Vehicle Spy 구입시 함께 제공되는 단독 프로그램입니다. 이 섹션에서는 neoVI Explorer의 기본적인 기능을 설명하여 이 유틸리티의 이해를 돕습니다.
5.1.1. Vehicle Spy 내에서 neoVI Explorer 시작하기¶
VSpy 내에서 neoVI Explorer를 여는 방법에는 여러 가지가 있습니다. 다음 두 가지가 가장 쉽습니다.
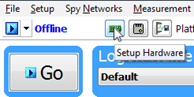
메뉴 항목: Setup 메뉴를 클릭한 후 Hardware 를 선택합니다.
Hardware Setup 버튼: 메뉴 바로 아래에 있는 기본 Vehicle Spy 도구 모음에 있는 버튼을 클릭합니다(아래 그림).
노트
Vehicle Spy가 온라인 상태일 때는 neoVI Explorer를 실행할 수 없습니다(시뮬레이션 모드에 있더라도). 온라인 상태에서 neoVI Explorer를 실행하려고 하면 VSpy를 오프라인으로 전환하라는 메시지를 표시합니다.
5.1.2. 독립 실행형 프로그램으로 neoVI Explorer 시작하기¶
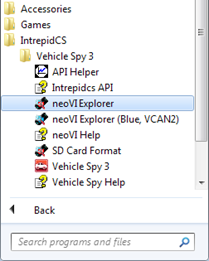
Vehicle Spy를 열지 않고 장치로 작업하려면 neoVI Explorer를 직접 실행할 수 있습니다. 시작 메뉴를 열고 IntrepidCS 폴더로 이동한 다음 Vehicle Spy 3 하위 폴더에서 neoVI Explorer를 선택합니다(아래 그림).
5.1.3. 독립 실행형 프로그램으로 neoVI Explorer 시작하기(API Kit 이용)¶
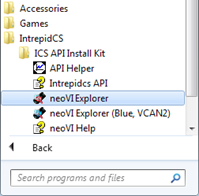
Vehicle Spy 대신 API 키트와 지원 파일을 설치했다면 위에서 설명한 것과 동일한 기본 프로세스를 사용하여 시작 메뉴에서 neoVI Explorer를 실행할 수 있습니다. 유일한 차이점은 하위 폴더의 이름이므로 IntrepidCS 폴더로 이동한 다음 ICS API Install Kit 하위 폴더를 열고 마지막으로 neoVI Explorer를 선택합니다(아래 그림).
5.2. 장치 인터페이스 방법¶
5.2.1. 장치에 연결하기¶
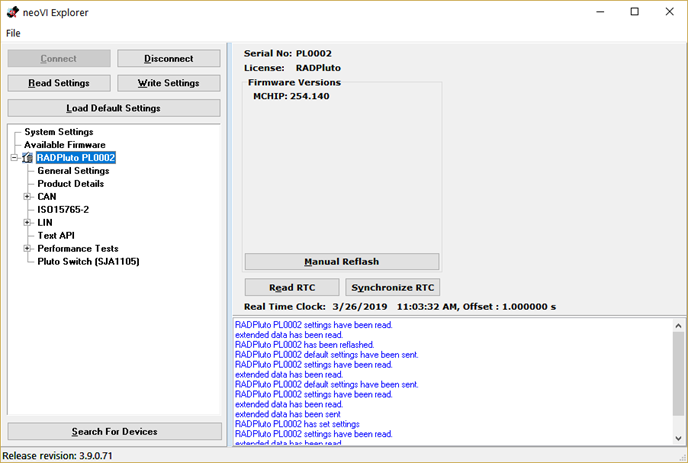
neoVI Explorer가 로드되면 왼쪽 메뉴 창에서 선택한 첫 번째 하드웨어 장치로 시작됩니다. 일련 번호와 함께 여기에 나열된 장치가 표시되어야 합니다. 연결할 장치가 보이지 않지만 다른 Intrepid 장치가 보이면 아래로 스크롤하여 찾으십시오. 여전히 표시되지 않으면 드라이버가 올바르게 설치되지 않았거나 전원이 제대로 공급되지 않았거나 USB 연결에 문제가 있음을 의미합니다.
장치를 관리하려면 탐색 창에서 해당 항목을 클릭한 다음(아직 강조 표시되지 않은 경우) Connect 버튼을 누릅니다. 장치에 성공적으로 연결되면 장치 이름 옆에 “좋아요” 아이콘이 표시되고 왼쪽의 탐색기 영역에서 현재 활성화된 네트워크 옆에 체크 표시가 나타납니다. 또한 오른쪽 메시지 상자에 “<장치 및 일련 번호> 설정을 읽었습니다.”라는 메시지가 표시되어야 합니다. 이것은 neoVI Explorer가 장치에서 현재 설정을 로드했음을 알려줍니다.
전체 화면은 아래 표시된 화면과 유사해야 합니다(단, 아래 표시된 장치 및 버전 번호는 다를 수 있음).
장치 검색¶
NeoVI Explorer를 시작한 후 PC에 새 하드웨어를 연결한 경우 대화 상자 왼쪽 하단의 Search for Devices 버튼을 눌러 프로그램에서 관리할 수 있는 새 하드웨어를 검색하도록 합니다.
메모
다양한 매개변수 그룹을 언제든지 클릭할 수 있지만 장치에 연결할 때까지 유효한 날짜가 표시되지 않습니다. 또한 설정을 변경하기 전에 장치에 연결해야 합니다. 그렇지 않으면 하드웨어 설정에 연결할 때 지워집니다.
5.2.2. 장치 구성¶
설정 쓰기 후 다시 불러오기¶
잠재적인 문제를 방지하기 위해 neoVI Explorer는 사용자가 지시할 때까지 장치 매개변수에 대한 변경 사항을 저장하지 않습니다. 이것은 장치의 펌웨어 내의 매개변수를 업데이트하는 Write Settings 버튼을 눌러 수행됩니다. 유지하고 싶지 않은 변경 사항을 적용한 경우 Read Settings 버튼을 누르면 장치에 저장된 설정이 다시 로드되어 아직 저장되지 않은 neoVI Explorer의 모든 수정 사항이 지워집니다.
장치 기본값 불러오기¶
모든 설정을 공장 기본값으로 되돌리려면 Load Default Settings 버튼을 누르십시오. 이것은 과거에 많은 변경이 이루어진 후 깨끗한 상태로 다시 시작하려는 경우에 편리합니다. 이 버튼을 누르면 실제로 기본값이 먼저 장치에 기록된 다음 자동으로 다시 로드되므로 Write Settings 도 누를 필요가 없습니다. 기본값이 장치로 전송된 다음 장치에서 읽혔다는 메시지 영역에 메시지가 표시됩니다.
장치 연결 해제¶
Disconnect 버튼을 눌러 장치 작업이 완료되었음을 neoVI Explorer에 알립니다. 이 단계는 실제로 선택 사항입니다. 왜냐하면 neoVI Explorer는 프로그램을 종료할 때 연결된 모든 장치에서 연결을 끊기 때문입니다.
neoVI Explorer 종료¶
다른 Windows 프로그램과 마찬가지로 오른쪽 상단 모서리에 있는 “X”를 클릭하거나 Alt+F4 키 조합을 눌러 neoVI Explorer를 닫을 수 있습니다.
5.3. 시스템 설정 및 펌웨어 업데이트¶
neoVI Explorer의 왼쪽에 있는 Explorer 창의 상단 두 항목에는 모든 하드웨어 장치에 적용되는 시스템 전체 설정과 펌웨어 업데이트와 관련된 정보가 포함되어 있습니다.
5.3.1. 환경 설정¶
neoVI Explorer의 왼쪽 창에 있는 트리 상단 System Settings 에서 활성화 또는 비활성화 할 수 있는 몇 가지 설정을 볼 수 있습니다.
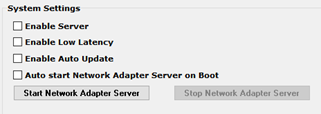
Enable Server: 하드웨어를 여러 애플리케이션에서 동시에 사용할 수 있도록 하는 백그라운드 프로그램인 neoVI 서버 기능을 켭니다.
Enable Low Latency: 전송 후 빠른 응답이 필요한 애플리케이션을 위한 고급 설정입니다.
Enable Auto Update: 활성화되면 neoVI Explorer와 Vehicle Spy가 펌웨어를 자동으로 업데이트합니다. 이 상자를 선택하지 않으면 펌웨어를 수동으로 업데이트해야 합니다. (자세한 내용은 아래를 참조하십시오.)
Network Adapter Server: 이더넷 포트가 있는 인트레피드 제품에서 사용하는 기능입니다. (귀하의 기기에는 적용되지 않을 수 있습니다.) 이 기능을 활성화하면 Intrepid 하드웨어의 이더넷 포트가 호스트 컴퓨터의 운영 체제에서 네트워크 인터페이스로 열거됩니다. 이 창에서 이 서버를 시작 및 중지할 수 있습니다. 컴퓨터 부팅 후 서버를 시작하도록 설정하는 체크 박스도 있습니다.
5.3.2. 사용 가능한 펌웨어¶
Available Firmware 는 다양한 Intrepid 제품에 대해 이 버전의 neoVI Explorer에서 사용할 수 있는 펌웨어 버전을 보여주는 정보 페이지입니다. 일부 장치에는 작동의 다양한 측면을 제어하는 여러 펌웨어 프로그램이 있습니다. 일반적으로 이 영역을 볼 필요가 없습니다. 이 섹션에서 볼 수 있듯이 neoVI Explorer는 장치에 연결할 때 장치의 현재 및 사용 가능한 펌웨어 버전을 보여주기 때문입니다.
5.3.3. 자동 및 수동 펌웨어 업데이트¶
경고
장치가 호환되지 않는 펌웨어로 작동하는 것처럼 보일 수 있지만 펌웨어 버전이 Vehicle Spy에 표시된 것과 일치하지 않는 한 적절하고 안정적인 작동을 보장할 수 없습니다.
펌웨어는 기본적으로 하드웨어를 실행하는 소프트웨어이며 장치의 다양한 기능을 활성화하는 데 필요합니다. Intrepid의 엔지니어는 새 기능을 구현하고 확인된 문제를 수정하기 위해 새 버전의 펌웨어를 정기적으로 생성합니다.
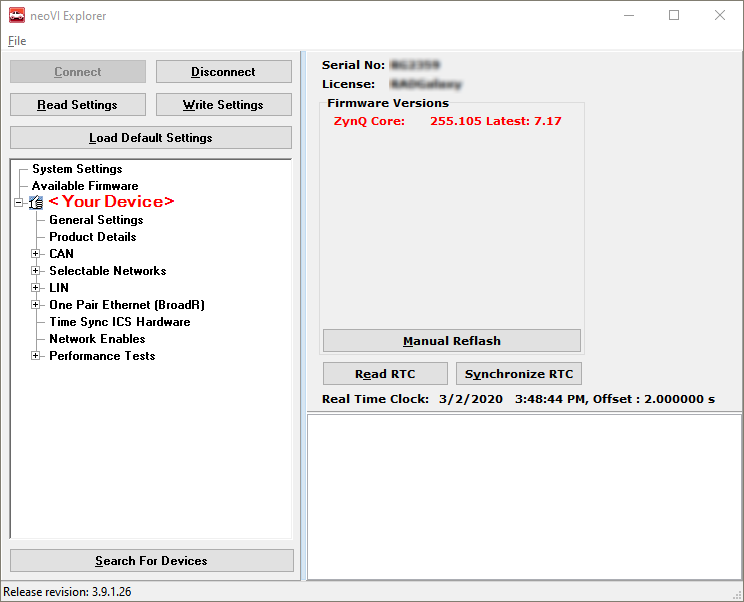
기본값이며 권장되는 Enable Auto Update 가 켜져 있으면 펌웨어 업데이트에 대해 걱정할 필요가 없습니다. NeoVI Explorer에서 장치에 연결하거나 Vehicle Spy에서 온라인 상태가 될 때마다 펌웨어가 확인되고 최신 버전이 있으면 장치가 즉시 업데이트됩니다. 자동 업데이트를 활성화하지 않은 경우 펌웨어 업데이트 시기를 제어합니다. 새로운 펌웨어가 나오면 아래와 같이 초기 연결 화면에서 알려드립니다. 펌웨어를 업데이트하려면 Manual Reflash 버튼을 누르기만 하면 됩니다.
5.3.4. 펌웨어 업데이트 과정¶
펌웨어 업데이트 동안 장치는 부트로더 모드로 전환되며 상단 레이블의 모든 LED가 동시에 깜박입니다. 업데이트가 완료되고 장치가 재부팅되면 일반 LED 점멸 패턴이 다시 시작됩니다. 펌웨어 업데이트 작업의 진행 상황을 보여주는 대화 상자가 화면에 표시됩니다. 아래에 예가 나와 있습니다. 펌웨어 프로그램이 장치로 전송되면서 neoVI Explorer 우측의 메시지 박스에도 메시지가 표시됩니다. 프로세스가 완료되면 대화 상자가 사라지고 neoVI Explorer에 업데이트가 완료되었음을 확인하는 다른 메시지가 나타납니다. 오류 메시지를 받거나 장치의 펌웨어를 업데이트하는 데 다른 문제가 발생하면 Intrepid에 도움을 요청하십시오.
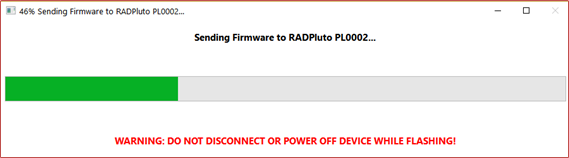
경고
펌웨어 업데이트 대화 상자의 경고에 유의하십시오. 장치에 발생할 수 있는 문제를 방지하려면 전체 펌웨어 업데이트 프로세스 동안 장치를 연결하고 전원을 켠 상태로 두십시오.
5.4. 일반 설정 및 제품 세부 정보¶
이 두 영역(General Settings, Product Details)은 장치에 대한 정보를 제공하고 몇 가지 기본 유지 관리 작업을 수행할 수 있도록 합니다.
5.4.1. 일반 설정¶
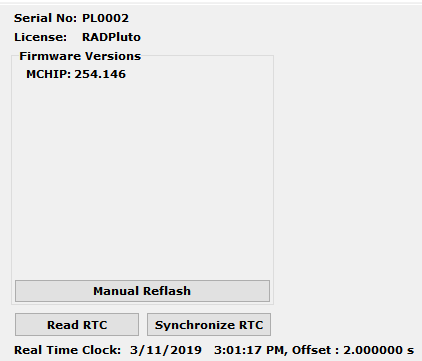
장치에 연결하면 창의 오른쪽 창에 장치에 대한 기본 정보가 표시됩니다.
장치의 일련 번호
현재 장치에 있는 펌웨어 버전 및 새 펌웨어를 사용할 수 있는지 표시합니다.
장치에 대한 하드웨어 라이센스가 인식되었음을 나타내는 메시지입니다.
장치의 실시간 시계에 대한 현재값입니다.
이 정보는 탐색기 탐색 창에서 장치 이름을 클릭하거나 바로 아래에 있는 General Settings 항목을 클릭하여 언제든지 다시 표시할 수 있습니다.
장치의 펌웨어 버전은 neoVI Explorer 내의 펌웨어 버전과 일치하면 검은색으로 표시됩니다. 그렇지 않은 경우 현재 버전과 사용 가능한 최신 버전이 빨간색으로 표시되어 업데이트가 있음을 알 수 있습니다. (업데이트 프로세스에 대한 자세한 내용은 이전 섹션을 참조하세요.)
이 화면에는 세 개의 버튼이 있습니다.
Manaul Reflash (이전 섹션에서 설명)
Read RTC 버튼은 장치의 내부 시간 시계를 다시 로드합니다.
Synchronize RTC 는 장치의 시계를 PC의 시계와 동일한 값으로 설정합니다.
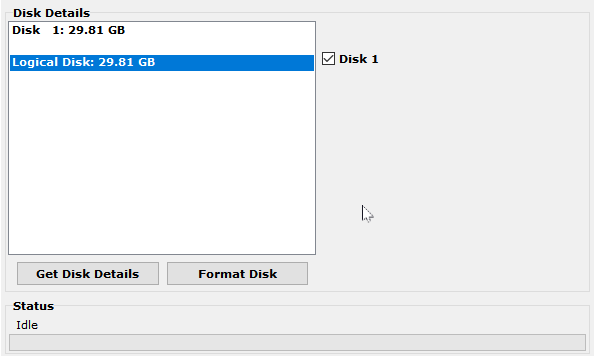
5.4.2. 제품 세부 정보¶
장치의 하드웨어 및 내부 설정에 대한 기술 데이터를 제공하는 정보 영역입니다. 일반적으로 지원 또는 문제 해결을 용이하게 하기 위해 Intrepid에서 요청한 경우에만 필요합니다. Copy To Clipboard 버튼을 사용하여 모든 정보를 Windows 클립보드에 복사한 다음 전자 메일이나 파일에 붙여넣을 수 있습니다.
5.5. 로거 설정(옵션)¶
Logger Settings 에서 Disable logging during extraction 을 선택하면 장치에서 데이터를 추출할 때 로깅을 비활성화합니다.
5.7. SerDes¶
메모
SerDes는 현재 사용할 수 없습니다
5.8. CAN 네트워크 설정¶
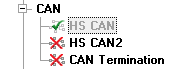
5.8.1. CAN 네트워크¶
neoVI Explorer의 이 영역은 고속 CAN 채널을 설정하는 데에 사용됩니다. 각 채널에는 “CAN” 그룹 아래에 항목이 있습니다(클릭 불가). 각 채널의 현재 상태는 이름 옆에 표시됩니다. 녹색 체크 표시는 채널이 활성화되었음을 나타내고 빨간색 X는 비활성화되었음을 나타냅니다. 아래 그림은 HS CAN이 활성화되고 HS CAN2가 비활성화된 예를 보여줍니다.
모든 CAN 채널에는 오른쪽 창에서 설정할 수 있는 변수가 있습니다. 기본 설정은 아래와 같습니다.
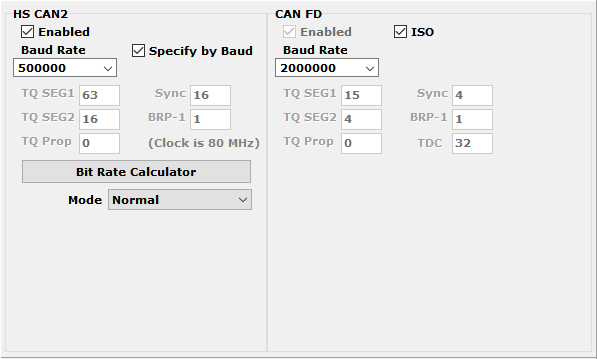
Enabled: 채널을 활성화하려면 체크합니다. 비활성화되면 다른 변수 컨트롤이 비활성화됩니다(회색으로 표시됨).
Specify by Baud: 이것은 채널이 Baud Rate 숫자에 의해 제어되는지 또는 하위 레벨 타이밍 변수에서 계산되는지를 결정합니다. 체크하면 Baud Rate 및 CAN FD Baud Rate 드롭다운 상자가 활성화되고 다양한 TQ, Sync 및 BRP-1 항목이 비활성화됩니다. 선택하지 않으면 그 반대입니다. Specify by Baud 이 기본값이며 특별한 요구 사항이 있는 고급 사용자를 제외하고 권장됩니다.
Baud Rate: Specify by Baud 를 선택한 경우, 아래 드롭다운 상자에서 채널의 전송 속도를 선택합니다. 기본값은 500000입니다.
CAN Timing Settings: Specify by Baud 를 선택하지 않은 경우, CAN 채널의 작동은 TQ SEG1, TQ SEG2, TQ Prop, Sync, BRP-1의 5가지 설정을 기반으로 합니다. 이러한 설정은 고급 사용자를 위한 것이며 일반적으로 기본값을 그대로 두어야 합니다.
CAN FD Baud Rate: Specify by Baud 를 선택한 경우, CAN FD 메시지의 데이터 영역에 대한 전송 속도를 선택하십시오. 기본값은 2000000입니다.
CAN FD Timeing Settings: Specify by Baud 를 선택하지 않은 경우, CAN FD 메시지의 데이터 영역에 대해 이러한 설정(TQ SEG1, TQ SEG2, TQ Prop, Sync, BRP-1)을 사용하십시오. 이 변수는 고급 사용자를 위한 것이며 일반적으로 기본값을 그대로 두어야 합니다.
Mode: 채널의 작동 모드; 다음 네 가지 옵션 중 하나를 선택하십시오.
Normal: 정상 작동(기본값).
Disable: 채널 비활성화
Listen Only: 이 채널은 전송 없이 메시지만 수신하며 오류 프레임도 생성되지 않고 Acknowledgement도 전송되지 않습니다.
Bit Rate Calculator: Intrepid Bit Timing Calculator를 실행하려면 이 버튼을 누르십시오.
5.8.2. ISO15765-2:¶
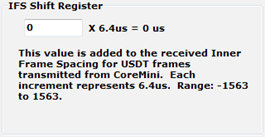
이 페이지에는 IFS Shift Register 설정이 있습니다(아래 참조). 이를 기본값 0에서 변경하면 FIRE 2에서 실행되는 CoreMini 스크립트가 전송하는 USDT 프레임의 내부 프레임 간격에 시간이 추가됩니다. 입력된 숫자에 6.4µs를 곱하여 시간 오프셋을 결정합니다. 허용되는 범위는 -1563~1563입니다.
5.9. LIN 네트워크 설정¶
장치 탐색기 트리의 이 섹션에서는 LIN 채널을 설정할 수 있습니다. 각 채널에는 “LIN” 그룹 아래에 항목이 있습니다(아래 참조). CAN 채널과 마찬가지로 녹색 체크 표시는 특정 채널이 활성화되었음을 나타내고 빨간색 X는 비활성화되어 있음을 나타냅니다.

든 채널에는 아래와 같은 변수가 있습니다. 이 이미지에서는 Advanced Options 체크 박스를 선택하여 옵션을 표시했습니다(아래 설명 참조).
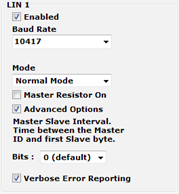
Enabled: 채널을 활성화하려면 체크합니다. 비활성화되면 다른 모든 변수 컨트롤이 비활성화됩니다(회색으로 표시됨).
Baud Rate: 채널의 전송 속도를 선택합니다. 기본값은 10417입니다.
Mode: 이 옵션은 현재 사용되지 않으며 기본값인 Normal Mode 로 두어야 합니다.
Master Resistor On: 장치가 지정된 LIN 버스에서 마스터로 작동하도록 하려면 이 옵션을 활성화하십시오.
Advanced Options: 이 확인란을 클릭하면 두 가지 추가 옵션이 표시됩니다.
Master Slave Interval: 마스터 ID와 첫 번째 슬레이브 바이트 사이의 시간(비트)(기본값 0).
Verbose Error Reporting: 이 옵션을 선택하면 break 오류 및 LIN 드라이버의 기타 오류 메시지가 표시됩니다.
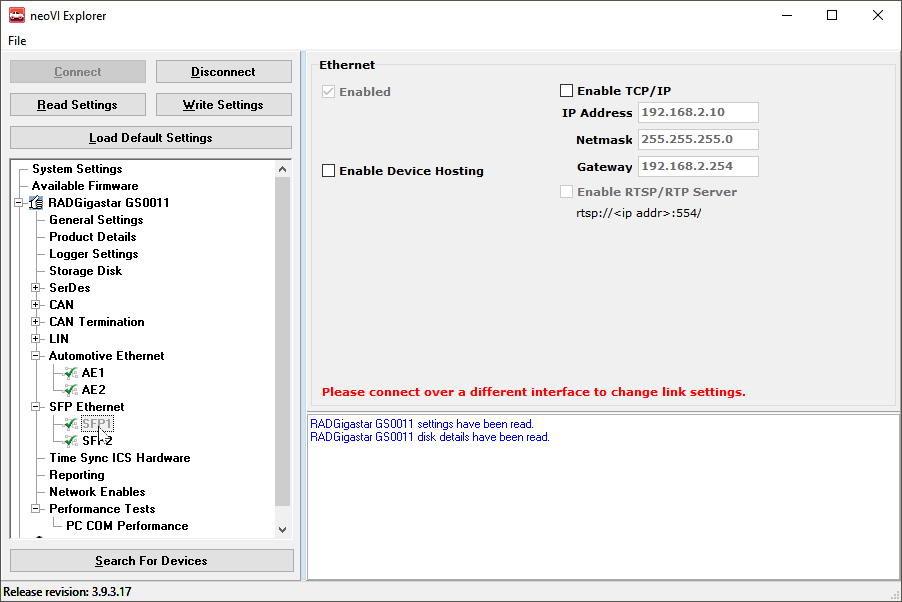
5.10. 이더넷 포트 구성¶
5.10.1. 1000BASE-T1 액티브 탭¶
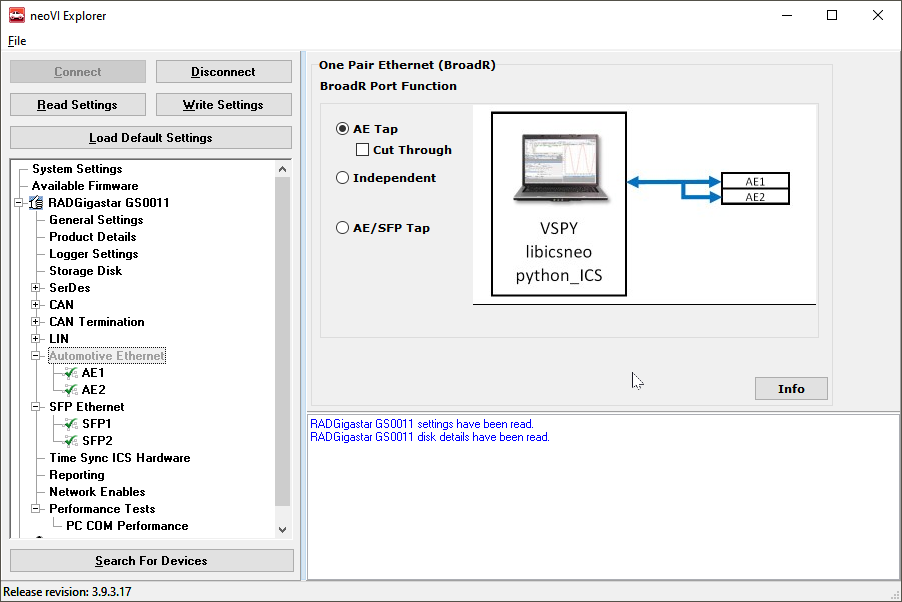
RAD-Gigastar의 주요 사용 사례는 1000BASE-T1 액티브 탭입니다. 아래 다이어그램에 나와 있는 것처럼 포트는 내부적으로 연결되어 AE1에서 들어오는 모든 트래픽이 AE2로 들어오고 그 반대의 경우도 마찬가지입니다. 또한 두 포트의 모든 수신 트래픽은 VSPY 또는 Intrepid의 오픈 소스 API와 함께 사용하기 위해 호스트 PC 연결 포트로 미러링됩니다.
기본적으로 액티브 탭은 “저장 및 전달” 모드에서 작동합니다. 전체 프레임이 반드시 모두 수신되어야 다른 포트로 송신을 시작할 수 있습니다. 이것은 프레임을 다음 목적지로 전달하기 전에 프레임 오류를 확인하는 스위치나 다른 이더넷 장치와 같이 정상적인 동작입니다. Cut-Through 모드를 활성화하면 이 대기 시간이 전부는 아니지만 대부분 제거됩니다.

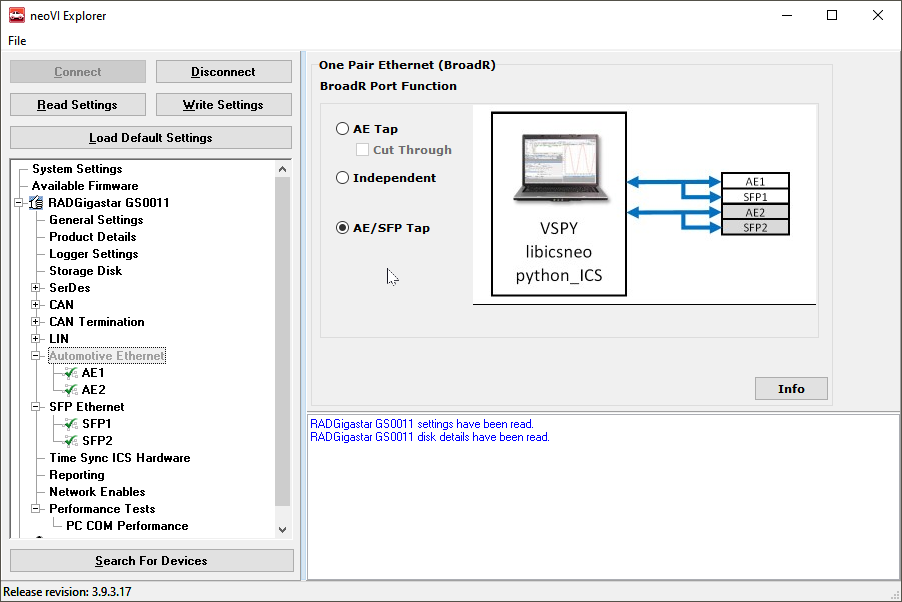
5.10.3. SFP/1000BASE-T1 액티브 탭¶
이 작동 모드는 1000BASE-T1 Active Tap과 거의 동일하지만 탭 쌍은 AE1/SFP1 및 AE2/SFP2입니다.
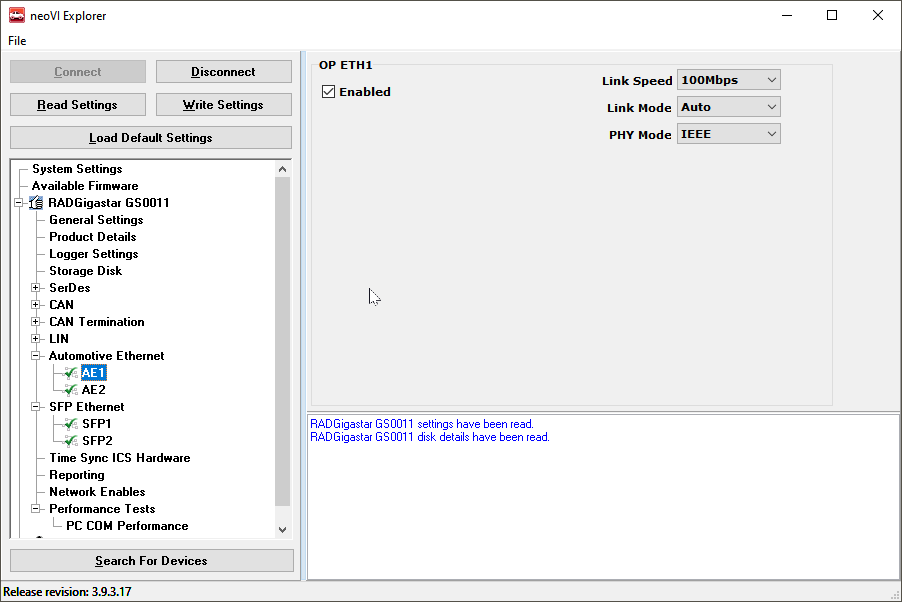
5.11. PHY 설정¶
5.11.1. 1000BASE-T1 PHY 설정¶
이 화면에서 88Q2112 1000BASE-T1을 설정할 수 있습니다.
링크 속도¶
속도는 100Mbps 및 1Gbps로 설정할 수 있습니다.
링크 모드¶
설정은 다른 PHY에 대한 링크의 마스터 또는 슬레이브와 관련됩니다. 다른 PHY와의 링크를 설정하기 위해 마스터 또는 슬레이브여야 하는지 자동으로 결정하도록 구성할 수도 있습니다.
PHY 모드¶
대부분의 경우 IEEE 요구 사항을 준수하는 모든 1000BASE-T1 PHY와 연결하려면 IEEE 모드로 설정해야 합니다. 레거시 모드는 Marvell 88Q2112 A0 및 A1 전용 설정입니다. 레거시 모드는 레거시 모드로 설정된 다른 88Q2112 A2 PHY와도 연결됩니다.
5.12. gPTP 시간 동기화¶
이 장치는 IEEE 802.1AS에 정의된 일반 정밀 시간 프로토콜을 지원합니다. Avnu Alliance에서 정의한 대로 Standard 프로필 또는 Automotive 프로필을 사용하도록 구성할 수 있습니다.
메모
이 장치는 스위치가 아니므로 단일 포트만 gPTP를 지원하도록 활성화할 수 있습니다. 이 포트는 장치 시계를 그랜드마스터와 동기화하기 위해 그랜드마스터 또는 클럭 슬레이브로 작동할 수 있습니다.
일반적으로 장치의 타임스탬프인 Physical Hardware Clock(PHC)는 장치가 연결될 때 호스트 컴퓨터와 동기화됩니다. 이 클럭이 다른 클럭 소스와 동기화되기를 원하는 경우 gPTP를 활성화할 수 있습니다. gPTP가 활성화되면 클럭이 자동으로 Epoch Time에 동기화되고 gPTP 그랜드마스터에 연결됩니다.
메모
기록된 메시지의 Epoch 시간이 2007년 1월 1일 이전인 경우 비정상적인 동작이 관찰될 수 있습니다.
gPTP는 다음 인터페이스에서 구성됩니다.
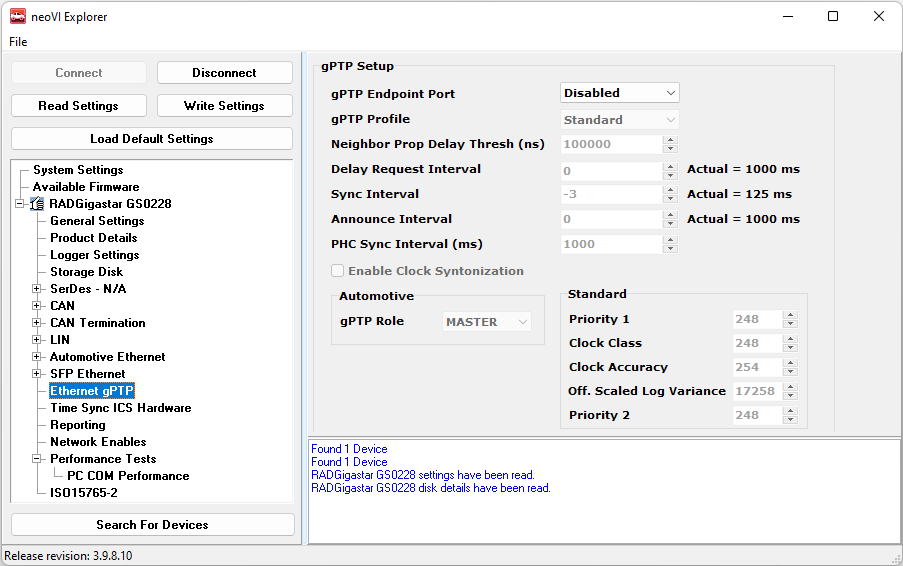
5.12.1. gPTP 설정¶
gPTP Endpoint Port |
gPTP 도메인에 연결할 장치의 포트를 선택하세요. |
gPTP Profile |
Automotive: AVNU가 정의한 프로필 |
Standard |
|
Neighbor Prop Delay Threshold |
pDelay가 이 값을 초과하면 장치가 asCapable하지 않은 것(PTP를 지원하지 않는 것)으로 간주됩니다. 기본값은 800이나 액티브 탭의 지연이 스트림 연결에 영향을 주지않도록 100000으로 올려 설정되었습니다. 특정 AVNU 테스트를 목적으로 한다면 최대 10000000까지 설정 가능합니다. |
Delay Request Interval |
Pdelay_Request 주기 |
Sync Interval |
Sync/Followup 메세지 주기 |
Announce Interval |
BCMA Announce 메세지 주기 (Standard profile 에서만) |
PHC Sync Interval |
PHC(Physical Hardware Clock)를 gPTP 클럭값과 동기화할 주기 (네트워크 메세지를 타임스탬프하는데 사용되는 클럭입니다.) |
Enable Clock Syntonization |
슬레이브 클럭은 이 클럭과 도메인내 다른 클럭사이의 주파수 오프셋을 보정하기 위해 비율을 사용합니다. |
메모
Delay Request Interval, Sync Interval, Announce Interval은 다음과 같이 계산됩니다.
값 = log2(초 단위 간격)
최소 =-5 / 최대 =22
5.12.2. Automotive Profile 설정(Avnu)¶
gPTP Role |
Master |
Slave |
5.12.3. Standard Profile 설정¶
Grandmaster Credentials |
Priority 1: 0-255, 더 낮은 값 = 더 높은 우선순위 |
Clock Class: 클럭의 TAI 추적 가능성을 정의하는 속성 |
|
Clock Accuracy |
|
Offset Scaled Log Variance: 클럭의 안정성을 정의하는 속성 |
|
Priority 2: 0-255, 더 낮은 값 = 더 높은 우선순위 |
5.13. ICS 시간 동기화¶
여러 ICS 장치를 사용하여 네트워크를 병렬로 기록하는 경우, 기록된 트래픽을 타임스탬프하는 데 사용되는 내부 시계를 동기화하여 로그의 시간을 정렬할 수 있습니다. 다음 화면은 이 시계 동기화를 설정하는 데 사용됩니다.
장치는 장치들 간의 전용 CAN 네트워크를 사용하여 동기화 합니다. 이것은 다른 DUT 또는 ECU가 이 전용 CAN 네트워크에 연결되어서는 안 된다는 것을 의미합니다. 각 장치에 대해 동기화에 사용할 CAN 네트워크를 선택하고 클럭 마스터인지 또는 클럭 슬레이브인지를 이 화면에서 설정합니다.
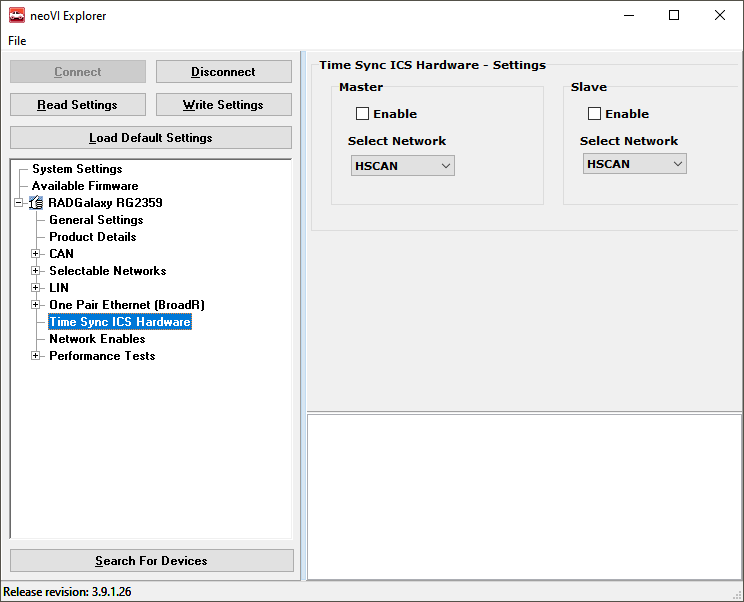
메모
여러 ICS 로거 간 동기화를 할 때 단 하나의 장치만을 마스터로 설정해야 합니다.
5.14. 보고¶
이 설정(Reporting)은 RAD-Gigastar SoC 온도 보고를 활성화합니다.
5.15. 네트워크 활성화¶
RAD-Gigastar의 네트워크는 이 설정(Network Enables)에서 활성화 및 비활성화할 수 있습니다.
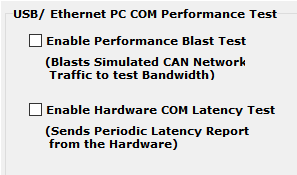
5.16. 성능 테스트¶
다음은 ICS 하드웨어와 호스트 컴퓨터 간의 대기 시간과 대역폭을 측정하는 데 사용할 수 있는 테스트입니다. 이 중 하나에 문제가 있다고 의심되는 경우 고객 지원팀에서 기꺼이 문제를 해결하도록 도와드릴 것입니다. 연락처 정보는 이 문서의 끝 부분을 참조하십시오.