2. Introduction and Overview
2.1. Introduction
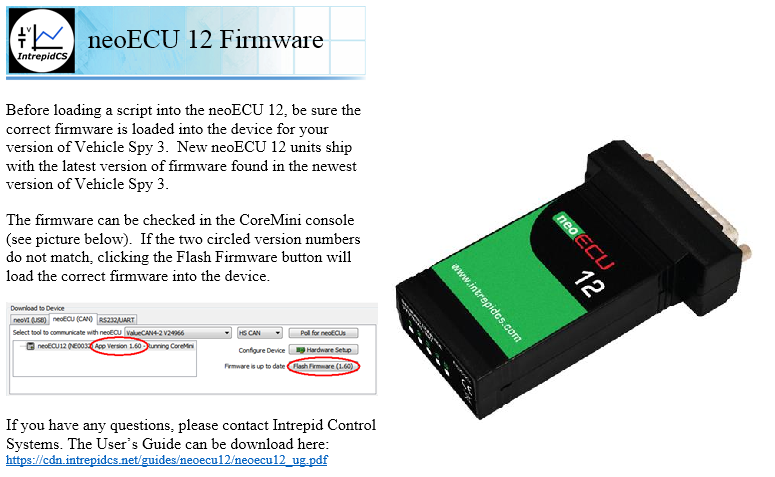
Thank you for purchasing an Intrepid Control Systems neoECU-12 low-cost embedded ECU. The neoECU- 12 is a scriptable, low cost node for CAN/CAN-FD, and LIN. The neoECU-12 provides two programmable CAN/CAN-FD channels. The CAN/CAN-FD channels can be selected for SW CAN, or LSFT CAN, or CAN/CAN-FD. The neoECU-12 also provides one channel of LIN, seven channels of MISC I/O (six at 3.3V, one at 5.0V), four channels of Analog Inputs, and five channels of PWM. The five channels of PWM are multiplexed with the first five channels of MISC I/O.
The neoECU-12 is the next generation of the neoECU-10 and adds CAN-FD capability.
2.2. Package Contents
Your neoECU-12 package includes both hardware and software.
Hardware
Upon opening the neoECU-12 box, you should find a neoECU-12 Firmware Guide on top with the device itself secured under a transparent plastic film in a cardboard holder. Remove the guide, the device and the cardboard, and you’ll see the following items:
2.3. Operational Overview
The neoECU-12 is a compact but powerful tool for working with vehicle networks. Its operation can be broken into multiple network communication, analog and digital inputs, and PWM and digital outputs. This device is ideal for CAN and/or LIN node communication and provides numerous connection points to interface to external circuits for command and control.
Using Vehicle Spy software you can define CAN and LIN transmit messages with custom data and send them on a periodic schedule or send them based on certain conditions. Using Intrepid’s Scripting language built into Vehicle Spy you can create custom intelligent scripts that control the input and output ports. The data from the input and output ports can be inserted as signals into the CAN or LIN messages or used to trigger CAN or LIN messages. The custom scripts will be compiled and programmed into the internal memory (called CoreMini) of the neoECU-12.
2.4. Block Diagram
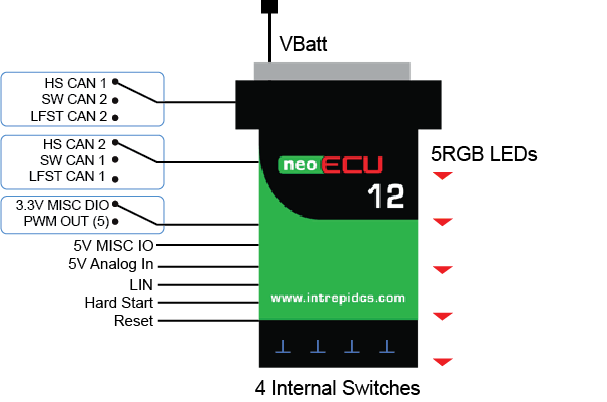
Please note HSCAN 1 H, LSFT CAN 2 H, and SW CAN 2 share the same pin (14) so only one can be selected. HSCAN 1 L and LSFT CAN 2 L share the same pin (15). You select which network you want to use in neoVI Explorer.
To force the neoECU-12 into bootloader mode put a “low” onto the Hard Start pin (before you power-up the neoECU-12). Otherwise leave it open since the neoECU-12 has an internal pull-up resistor keeping the pin “high”.
To force the neoECU-12 into reset mode put a “low” onto the Reset pin. Otherwise leave it open since the neoECU-12 has an internal pull-up resistor keeping the pin “high”.
2.5. Summary of Key Features
The neoECU-12 is a low-cost embedded ECU with CAN FD and LIN. It has two channels of CAN/CAN FD which can also be configured for SW CAN and LSFT CAN. It has digital inputs and outputs, analog inputs, and PWM outputs. There are four internal programmable buttons and five internal tri-color LEDs that are visible on the back side of the unit.
- Construction
Compact design: 2.2” x 3.7” x 1.0” (5.6 X 9.4 x 2.5 cm)
Light weight: less than 2 oz. (57 g)
Plastic casing
25-pin male DB 25 connector
- Power and Performance
Fourth generation neoVI architecture
32 MB memory for custom scripts
Field upgradeable firmware
4.5V to 40V input power on VBatt
Lower power sleep mode <1mA
- Network Interfaces and Features
- Two selectable CAN channels: CAN/CAN-FD or SW CAN or LSFT CAN
Software enable/disable, baud rate and other parameters
- 1 LIN / K-Line channel
Software enable/disable, baud rate and other parameters
Six selectable MISC DIO or PWM output channels. NOTE: PWM 3 waveform is mirrored on PWM 6. Frequency range is 5 Hz to 20 KHz. Maximum frequency is 100 KHz when using 50% duty cycle.
Four Analog inputs. 12-bit A/D resolution (0-4095 counts), 5V maximum input voltage.
Hard start pin. If a “low” voltage is detected on this pin then the neoECU-12 starts in bootloader mode.
Reset pin. If a low voltage is inserted on this pin then the neoECU-12 is reset.
2.6. Hardware and Software Requirements
A vehicle network, either within an actual vehicle or a test bench environment.
A DC power supply capable of providing 4.5V (minimum) to 40V (maximum), with a nominal current of 70 mA at 12V. Your network setup must include wiring capable of providing this power on pin 25 and ground on pin 13.
In order to program the neoECU-12 you will need a ValueCAN or neoVI device connected to HS CAN 1 and a licensed copy of Vehicle Spy (Pro or Enterprise version) 3.9.1.13 or higher running on a Windows-based PC or laptop.